1Professor, Shivajirao S. Jondhle College of Pharmacy, Asangoan, Thane – 421 601, Maharashtra, India.
2,3,4,5,6Research Scholar, Shivajirao S. Jondhle College of Pharmacy, Asangoan, Thane – 421 601, Maharashtra, India
7Asst.Professor, Shivajirao S. Jondhle College of Pharmacy, Asangoan, Thane – 421 601, Maharashtra, India.
The fields of micro and nanorobotics have been a rapidly expanding field of study in recent years, especially because of the potential applications in medicine. For applications like illness diagnostics, minimally invasive surgery, and targeted medication administration, these small gadgets have enormous potential. Because micro/nanorobots can propel themselves, they can accurately transport therapeutic substances to difficult-to-reach parts of the body, unlike conventional pharmaceutical delivery systems that need blood circulation to reach afflicted places. Both internal processes like chemical reactions and external ones like magnetic fields, light, acoustic waves, or electric fields can propel their motion. Furthermore, despite their lack of autonomous movement, cell-based microrobots and origami made from DNA constructs have also been investigated for biomedical purposes. Despite their enormous potential, the majority of micro/nanorobot research is being conducted in laboratory (in vitro) settings, and in vivo investigations are still in their infancy. To confirm their efficacy and safety for clinical drug delivery, further thorough biological testing is necessary. The present status of research, current challenges and potential future paths in the development of micro/nanorobotic systems are highlighted in this study
Enhanced targeting proficiencies
The remarkable targeting capabilities of medical nanorobots, which are mostly due to the complex sensors built into their architecture, represent a clear advantage over traditional nanomaterials. These sensors provide nanorobots the ability to detect minute changes in the body, including shifts in temperature, pH, or the presence of particular biomolecules, such as proteins, enzymes, or other physiological indicators.(17). As a result, medicinal drugs may be administered with a high level of accuracy, reducing the likelihood of adverse effects and off-target effects. Additionally, the combination of these advanced design elements enables medical nanorobots to react and adapt to the changing needs of the human body. In order to achieve the best possible therapeutic results, they may instantly alter their trajectory and delivery methods in response to biological stimuli. Medical nanorobots are the only ones with this flexibility and responsiveness, which offers substantial benefits over traditional nanomaterials, which are usually passive and rely on the body's natural mechanisms for release and dispersion.
External ultrasound?driven nanorobots
Setting up an acoustic condition is not that difficult.Without inflicting obvious harm to the human body, sound waves might power nanorobots from outside by penetrating deeply into biological tissues through a variety of media, including solid, liquid, and air. However, using ultrasound might cause oxidative stress in the cells, which could affect both the target tumor cells and healthy cells.(18) The fundamental process is that the ultrasonic wave creates a driving force for the movement of the nanorobots by applying a local acoustic streaming strain on the surface of asymmetric nanorod-nanorobots. It may be possible to drive tubular nanorobots in a flexible movement mode and accelerate the evaporation of chemical fuel using high intensity focused ultrasound. These microtube-based robots have the ability to move very quickly and exert a powerful pulling force on tissues(19).
Hybrid?driven nanorobots
Numerous studies attest to the effectiveness of nanorobots in delivering drugs precisely when powered by a hybrid power source. Strong binding capabilities toward toxins and pathogens have been demonstrated for nanorobots, enabling exceptional detoxifying capabilities.(20). used layer-by-layer self-assembly technique to construct a tubular multi-layer microrobot. These microrobots can deliver doxorubicin to cancer cells at up to 68 microns/second thanks to a combination of bubble driving and magnetic field guidance. Together with other physical power sources, the magnetic field might potentially regulate the movement of nanorobots (21).
2. Micro-Robotic Technologies for Drug Delivery: -
2.1 Types of Micro-Robots: -
There are several varieties of micro robots, each with special features and intended uses. (22) Some popular categories of microrobots may be categorized as biological (biohybrid, cell-based, nanobiobots), synthetic (MEMS/NEMS, soft, swarm, bio-inspired), functional (medical, environmental, industrial), and hybrid (bio-synthetic) depending on their design and usefulness. Utilized in industrial, environmental, and medicinal domains, providing accurate services such as medication distribution and monitoring, which are explained as follows: -
1. Biological Microrobots:
These robots fall into three primary categories: nanobiobots, cell-based robots, and biohybrid robots. Biohybrid Robots: These microrobots blend synthetic materials with biological elements like cells or tissues. (23). They can behave similarly to living things and are frequently employed in biological applications including tissue engineering and targeted medication delivery. Cell-Oriented Living cells, like bacteria or mammalian cells, are incorporated into synthetic structures to create robots. They can be made to do things like detect chemicals or react to outside stimuli by moving. (24). Nanobiobots are nanoscale robots that can carry out nanoscale tasks like molecular assembly or manipulation because they are constructed from biological ingredients like DNA or proteins. (25)
2. Synthetic Microrobots:
MEMS and Nanoelectromechanical Systems (NEMS) robots, soft robots, swarm robots, and bio-inspired robots are the four types of robots that make up this category. Engineering methods at the micro and nanoscale are used to create MEMS/NEMS robots. They typ ically incorporate miniature actuators, sensors, and control systems for precise manipulation and sensing tasks(26). Bio-Inspired Robots as a group that are inspired by biological structures or species include robots that resemble insects for agile movement, robots that resemble fish for underwater exploration, and robots that resemble birds for aerial surveillance.(27) The concepts of swarm robotics are based on actions seen in natural systems, such bird flies or ant colonies.(28)
3. Functional Microrobots:
Industrial, environmental, and medical microrobots are all included in the third category.(29)nMedical Microrobots These microrobots, which were created especially for medical use, may navigate through bodily tissues, distribute medications to specified areas, carry out minimally invasive operations, or support diagnostic processes.(30) Environmental microrobots are employed for environmental monitoring and cleanup activities, such identifying contaminants in soil or water, clearing away microplastics, or investigating dangerous areas. (31)
4. Hybrid Microrobots:
Creating hybrid microrobots by fusing synthetic and organic components (32). referred to as bio-synthetic hybrids having improved capabilities, such adaptive behaviors, self-healing processes, or biocompatibility for therapeutic uses. (33) The following is a list of some of the modern microrobot kinds that are utilized to navigate within the human body:
Magnetic Micro-Robots: -
External magnetic fields are used to push these tiny robots. They may be precisely inserted into blood arteries and are usually composed of biocompatible materials. They provide the potential for tailored medication administration and provide high controllability. However, because of their small size, they have a restricted payload carrying capability. (34)
Biohybrid Robots:
These microrobots create hybrid systems by fusing synthetic materials with biological elements like live cells or tissues. They can take use of synthetic control systems while utilizing biological traits like self-propulsion or tar-geting capabilities. Improved biocompatibility and the ability to do complex tasks are two benefits of biohybrid microrobots. However, there are difficulties in integrating biological components and preserving long-term functionality. (35)
Optical Micro-Robots:
Light which serves as a source of energy is able to drive the Motion of microbots which also present advantages of dynamic. programmable, wireless and remote manipulation on High spatial and temporal resolution Light.Driven micro robots can be grouped into three categories. Based out of their operating principles. In the first category which is known. As in the case of optical field driven microrobots which use the fact that. Optical tools that are able to control and modulate an input of a physical field to impose. actuation force on microrobots (36-39) Microrobots driven by optical tweezes. OT are a revolutionary micromanipulation technology invented by in the 1980’s which is when Arthur Ashkin did. Nobel in Physics in 2018. We have seen that which went on to present. And which did so to transform scientific research by providing.non-contact, non-invasive and precise manipulation of Micron/nano scale objects. To date, OT has used in. Many areas in the natural sciences that range from cell/ virus. Manipulation (40-42). characterization of biomolecules and biosystems(43-44), micro-/nano-assembly (45-46), to trapping and In recent years some groups have looked at the use of OT to control. micromechanical structures for different applications, which led to the development of optical. Microparticles. In the case of OT it is based on the transfer of momentum from a. When a photon interacts with an object, to a particle. Which can form at the beam focus area of intensity gradient force.
3 Mechanisms of Action :-
3.1 Navigation and Targeting:-
As robotics, sensing, and medical imaging technologies evolve, the navigation methods focus the progress on developing more sophisticated and advanced micro robots for biomedical purposes. (47-48) For micro robots' navigation inside the human body, one can use magnetically controlled, wirelessly communicable, optically tracked, and sensor integrated robots. These methods cultivate precise movement, flexible adaptation, and improved safety during medical procedures. Here are the most common navigation methods for micro robots inside the human body: -
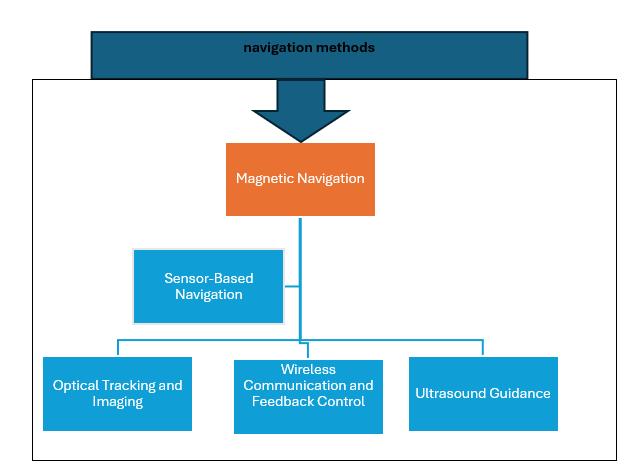
Fig 1 :- Navigation Method
1.magnetic Navigation:-
Magnetic navigation uses external magnetic fields to control micro bots inside the body. These bots have magnetic elements which serve the purpose of responding to the external magnetic fields and allows more precise navigation along the bots predetermined paths. This technology is most useful to overcome the less than optimal situations where one lacks physical line of sight or direct physical contact to the area in question, for instance, moving through blood vessels.{49}
2.Wireless Communication and Feedback Control:-Micro robots employ wireless communication systems for instruction reception and feedback communication. Feedback control mechanisms consisting of closed-loop systems allow for seamless and real-time alterations made to address changes in the environment and navigational obstacles. The systems guarantee precision in the control of navigation and bolsters the ability of the robots to adapt more readily to the ever-changing conditions within the human body(50)
3. Optical Tracking and Imaging:-
Optical tracking methods include cameras and other optical sensors to monitor the position and movement of micro robots. Fluorescence imaging and endoscopic imaging methods provide operators with real time visual feedback to track the robot’s location and trajectory throughout navigation. For procedures where precise localization and visualization are necessary, such as targeting tissue and exploring organs, optical tracking is very beneficial.(51)
4. Ultrasound Guidance :-
Ultrasound technology is used for imaging and guidance for micro robots in the human body. Ultrasound can travel through tissues, enabling.for non-invasive visualization of anatomical blocks and the position of the robot into. surrounding tissues. Ultrasound guidance is useful for exploring organ or cavities where direct line-of-sight is blocked, improving the robot’s navigational accuracy and safety.(51)
5. Sensor-Based Navigation:-
Micro robots often incorporate a variety of sensors, including proxitunnels. From the measured low-frequency spectra, we met Yegers, who found out that there's another ubiquitous channel on one of our devices. sensors, pressure sensors, and environmental sensors to learn what is around them. Navigation is computed from the sensor data by executing the commands to identify obstacles or alter the robot’s trajectory in real time. Sensor-based navigation improves the robot’s capability of maneuvering through challenging regions or entering hollow regions during the navigation of locally dynamic environmentsby not colliding and/or going into a hole in the course of navigationor hazards.(51)
3.2 Drug Delivery Mechanisms : -
1. Diffusion-Based Delivery:- The employment of micro/nanorobots that can effectively harness a range of energy sources to enable motion has the potential to significantly revolutionize the pharmaceutical industry, especially in the area of targeted medication administration. Drugs can be guided toward their desired destinations by precisely delivering them to certain tissues or anatomical areas and using controlled release mechanisms.(52) Active propulation Robots– These micro/nanorobots possess self-propulsion mechanisms to navigate within the body
Examples: Microswimmers, Microrobotic capsules, Light-powered microbots, Magnetic field-driven microbots, Acoustically-driven microbots, and Chemically-powered microbots
Passive transport robots – These micro/nanorobots rely on external factors or carriers for transport within the body Examples: DNA nanorobots, Nanoparticle-based carriers, Molecular shuttles, and Biomolecule carrier
TABLE 1: - Diffusion Based Delivery
2. Micro-Reservoir Release: - For targeted medication distribution within the gastrointestinal system, an isolated, controlled capsule has been designed. It is made up of a shell, a piston, an embedded magnetic pointer, a tele-control unit, a drug release mechanism, and a magnetic switch. It is 10.4 mm wide and 30 mm long. The drug's release mechanism, which comprises of a micro-thruster, a sliding defensive shell, and a piston, is stimulated by an external radio frequency signal of 330 MHz. The piston is propelled forward by the burned propellant with enough force to discharge the prescribed amount of medication (0.6 mL) from the drug reservoir.(53) Mechanical systems are used to organize and regulate categorization pumps. Molecular markers or chemotactic sensors are used to deliver them, ensuring the targeting system's accuracy. The on-panel source of electricity, glucose, and oxygen is derived from the restricted settings, including intestinal fluid, blood, and cytosol. After completing the duties, nanorobots can be eliminated or recovered via centrifuge nanopheresis.(54)
3.Environmentally Triggered Controlled Release: - An environmental responsive nanorobot with ABF was constructed based on bacterial structure. The flagellar helical shape changes in reaction to environmental stimuli, resulting in varying propulsion.(55) He produced gas. drove the system's motion. The particles were guided by the magnetic field to the
aim. The medication was then released when the outer polymer shell was dissolved by NIR.
to work. Every substance used to create nanorobots is either biodegradable or biocompatible. A mesoporous silica-based core-shell nanorobot with self-propulsion was described by AnaC et al. capacity in ionic liquids. The nanorobot was functionalized as a catalyst using urease to encourage urea's breakdown into carbon dioxide and ammonia, allowing the nanorobot to be Capable of moving independently.(56). An ideal micro/nanorobot needs to be able to distribute drugs on its own and move precisely. Additionally, it should be stable in the external environment, non-toxic, and able to be eliminated from the body or biodegraded after the activity.(57) More challenges must be addressed for the target delivery of micro/nanorobots in physiological environments. First, irregular Brownian motion is more noticeable for smaller particles; micro/nanorobots must overcome Brownian motion to achieve directed mobility. Additionally, when robots are reduced to the nanoscale, it is important to consider their aggregation behavior in liquids, since this will disrupt the directed movement of the micro/nanorobot.(58)
Applications of Micro-Robots in Drug Delivery
1.Cancer Therapy :-
Patients would benefit greatly from successful physical targeting of cancers because fewer doses of the medication would need to be given and side effects would be greatly reduced or eliminated if the drug were not present in tissues other than the cancer. As a result, enormous efforts have been made in the past few decades to develop medications that accumulate in cancer tissues while avoiding normal organs. The packaging of small-molecule medications, which are normally smaller than 1 nm, into larger nanocarriers that are up to several hundred nm in size has been an intriguing strategy. This has changed the drugs' chemical and physical characteristics and modulated their pharmacokinetic profiles. Longer drug circulation times, greater cargo capacity, and more localized delivery are benefits of encapsulating the coupled medications into such nanocarriers.(59) By ability to combine the benefits of earlier nanomedicines in terms of drug protection, selectivity, and biocompatibility with active motion, microrobots, as an adjuvant treatment to nanocarriers, have enormous potential to enhance both short- and long-range malignancies targeting.
2. Neurodegenerative Diseases :-Nanocarriers, which are one of the plates of nanorobots, have created a full system platform that can transport medications in vivo. They are projected to be turned into nanorobots in newer versions. The transport of magnetic nanoparticles through the sieve plate and into the olfactory bulb of the brain may likewise be significantly enhanced by magnetic gradients. Another technique for improving BBB transport in the management of brain disorders is focused ultrasonography. Other techniques include the use of CPP, ultrasound, and osmotic shock.(60)
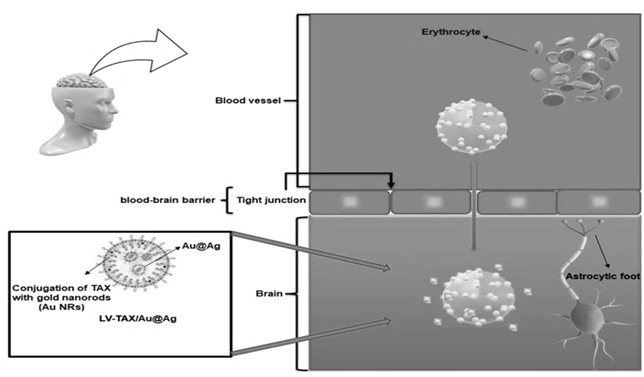
Fig 2:- Neurodegenerative Diseases
Cardiovascular Diseases:-
MMRs have to pick the best way to unload their goods when they get at the destination. Arriving in the target region with MMRs filled with cells is insufficient. However, distribution consistency is critical for drug-loaded MMRs, particularly those delivering anticancer drugs. They have to deliver their stuff at predetermined times to particular areas. The goal of this specific distribution is to reduce the medications' negative effects on people.(61)
Slow-Release :-
The naturally occurring slow-release mechanism, which dissolves drug-encapsulating materials at specific pH levels to enable gradually release, is the most used mechanism for drug release(62). In one example, Chen et al. created a dual-layer drug-loaded MMR with an outer layer of calcium alginate hydrogel and an inner layer of magnetic chitosan microspheres (mCS). Under a vision-guided magnetic propulsion system, the MMRs precisely delivered the drug-loaded mCS to the intended location; in acidic environments, the outer layer of MMRs protected the mCSs; in alkaline environments, the calcium alginate hydrogel dissolved at a controlled rate, meaning the drug could be released in the intestine in lieu of the stomach.(63)
5. Future Directions:-
5.1 Hybrid Systems:-
This fundamental finding, which offers remarkable accuracy in gene editing and detection, has altered the course of molecular biology. CRISPR/Cas9, a gene editing technology beneficial in transcriptional interference, epigenetic control, biosensing, etc., was used to accomplish this. CRISPR/Cas is exceptional due to its intrinsic ability to recognize and cut DNA/RNA sequences with great accurateness(64-65).
5.2 Integration with AI and Machine Learning:-
1.Controlled release systems:-
As an outcome, controlled release methods were developed. Control theory and artificial intelligence techniques have gotten more well recognized, and their ramifications in this area have spread significantly. These perceptive observations imply that the multidisciplinary approach has a greater impact on resolving the extremely practical problems that are present in this subject. The following are some difficult aspects of drug pharmacokinetics, dynamics, and modeling that can be improved or made harder by adding certain procedures or uses.(66)
2. Advancements in AI algorithms for better predictions:-
The creation of intelligent systems has been made possible by artificial intelligence (AI), which has also been effectively integrated into multiple fields of public health research.(67) AI models have been found to be better at identifying non-linear patterns, evaluating enormous volumes of complicated data, and making predictions about diseases or medication in big data. These models may be trained, refined, verified, and used on various scales. Different AI algorithms are appropriate for a variety of applications or are intrinsically based on certain concepts.(68) This effort was driven by the possibility that many AI algorithms are underutilized but may be better utilized. AI algorithms have generally been extensively and successfully used in a variety of drug discovery or development prediction studies or trials, ranging from classical statistical and mathematical models to more recently popular deep learning techniques.(69-70)
5.3. Personalized Medicine:-The development and manufacturing of cutting-edge materials that improve functionality, efficiency, and flexibility is crucial to the advancement of next-generation micro/nanorobotics. These materials contribute to the adaptability needed for a wide range of applications, particularly in the organic and environmental domains, in addition to giving particular characteristics. Micro/nanorobotics now heavily relies on emerging 2D materials such carbon nitrides (C3N4), TMDs, and MXenes.(71,72 73) MXene-based microrobots have become attractive equipment for targeted photothermal conversion due to their exceptional features, including excellent conductivity, chemical stability, simplicity of surface functionalization, and outstanding photothermal conversion efficiency. Use of medications and complementary therapeutic ().
Real-Time Responsiveness: Real-time monitoring and diagnostic capabilities have developed significantly with the inclusion of imaging and biosensing features into MXene-based microrobots. Clinicians might be able to follow the movements and therapeutic effects of MXene microrobots with high spatial resolution by effectively integrating photothermal, fluorescence, and photoacoustic imaging.(74)
Surface Functionalization: - Surface functionalization is of the utmost significance. Researchers can improve MXene microrobots' capacity to identify and adhere to target cells by affixing certain ligands, antibodies, or other targeting moieties to their surface.
Another method for targeted distribution of microbots is the use of cell membrane as a coating. Drugs may be distributed selectively thanks to this targeting mechanism, which may result in more potent therapies. Targeting agents must be selected with care though, since a poor choice might lead to decreased specificity or unwanted interactions with non-target cells.(75)
Synergistic Therapies: For scientists to successfully utilize MXene-based microrobots for targeted medication administration and synergistic therapy in healthcare settings, a number of issues need to be overcome. The translational gap between laboratory research and clinical applications is one of the main obstacles (76)Clinical study design and execution become more complicated when medicines are tailored to account for these variations. It is crucial to modify MXenes' design in accordance with the therapeutic needs of particular applications in order to maximize their application potential. This may be done in a number of ways. By choosing various parent phases of MAX (Mn+1AXn), the M (metal) and N elements in the MXene structure may be adjusted, affecting its conductivity, magnetism, and photothermal characteristics. MXenes with enhanced performance or special functions can be created by carefully selecting the right MAX phase and refining the synthesis procedure. After MXene-based biomaterials are developed with therapeutic applications in mind, thorough in vitro assessments and in vivo animal research are required to improve the system(77)
CONCLUSION
Micro robots are essential instruments in contemporary technological breakthroughs because of their capacity to enhance accuracy, efficiency, safety, and innovation in a variety of sectors. The current state of research on targeted medication delivery micro/nanorobots was included in this study(78). Micro/nanorobots having an exogenous or endogenous power to enhance the directed movement were invented in response to the need for precision targeted medicine delivery. Exogenous power-driven micro/nanorobots can be powered by electric fields, magnetic fields, light energy, audio fields, etc. Although it boasts the capacity to precisely regulate location, it requires specific and intricate operating processes and is readily disrupted by the interior environment. Chemical reaction energy is typically used to power self-propelled micro/nanorobots, which have the advantages of being inexpensive and easy to use. However, the direction of its motion cannot be appropriately controlled, and the power may be inefficient and difficult to drive the micro/nanorobot later on when the reaction is occurring. More challenges must be addressed for the target delivery of micro/nanorobots in physiological environments. First of all, irregular Brownian motion is more noticeable for smaller particles; micro/nanorobots must overcome Brownian motion in order to achieve directed mobility. Additionally, the aggregation behavior of robots in liquids should be considered when downsizing them to the nanoscale, as this will disrupt the directed movement of the micro/nanorobot [92,93]. Half of the published research on nanorobots only documented successful in vitro tests. However, it is unlikely that the focused medication delivery capability of nanorobots can be preserved in a complicated bodily fluid system.
REFERENCES






Dr. Manisha Nangude, Akhand Desai, Gayatri Choudhary, Trupti Dalvi, Rutuja. Damse, Gayatri Dhere, Gauri. Bhamare, Micro Robotics in Targeted Drug Delivery, Int. J. of Pharm. Sci., 2026, Vol 4, Issue 2, 3373-3387. https://doi.org/10.5281/zenodo.18720578
 10.5281/zenodo.18720578
10.5281/zenodo.18720578
